近日,美国电气和电子工程师协会(简称IEEE)旗下著名期刊《IEEE Transactions on Industrial Informatics》在线发表了我院教师陈宝通讲师、夏绪辉教授与英国拉夫堡大学航空与汽车工程学院Gbanaibolou Jombo等学者合作的研究成果“Knowledge Sharing enabled Multi-Robot Collaboration for Preventive Maintenance in Mixed Model Assembly”,该论文创新性提出了开放装配环境下机器人智能体学习、共享劣化机器知识的KS-enabled MRC方法。
《IEEE Transactions on Industrial Informatics》(TII)是IEEE旗下高级别、具有广泛影响力的期刊,影响因子10.215,是工程技术行业国际TOP期刊。
多机器人互联与协作是复杂产品混流装配的重要实现形式。目前,开环控制系统中的多机协作主要依赖于硬编码交互模式实现,自学习能力和可扩展性相对较低。协作机器人难以获取劣化机器已创建的装配环境、已学习的经验模型、已优化的参数配置,亟需创建面向混流装配的多智能体知识共享模式,弥补欠确定指令与详细操作规范之间的差距。
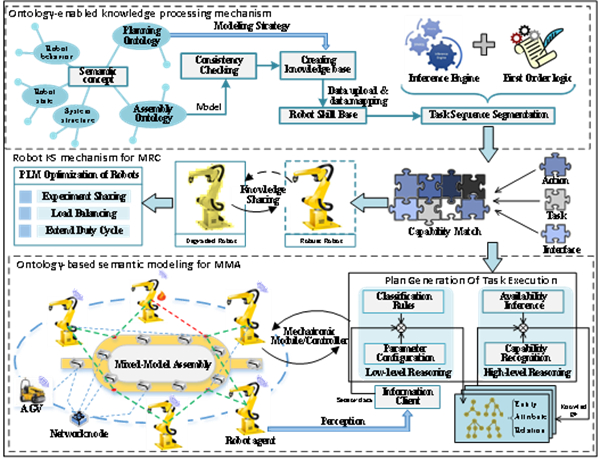
如上图所示的KS-enabled MRC系统架构,作者通过本体支持的语义建模方法,为混流装配线构建可共享的形式化语义环境;根据机器人的能力和任务环境,建立与任务相关的动作原语和基于本体的机器人技能库;利用Wu-Palmer 相似性度量和一阶逻辑对新任务进行匹配和推理,创建了退化机器人知识共享与优化知识更新机制。KS-enabled MRC探索复现了混装协作设备任务执行的通用性,避免某项装配功能(或部件)持续劣化造成多功能设备停机,同时增进了混流装配线自适应调控过程的敏捷性。
论文信息:B. Chen, Y. Zhang, X. Xia*, M. Martinez-Garcia and G. Jombo, Knowledge Sharing enabled Multi-Robot Collaboration for Preventive Maintenance in Mixed Model Assembly, in IEEE Transactions on Industrial Informatics, doi: 10.1109/TII.2022.3158978.